DC Motor board with ZDev
In this second article, in the DC Motor series, we provide sample code to use the DC Motor Board with ZDev on the ZKit-ARM-1343. If you haven’t, you might want to read the DC motor board functionality described in the blog article DC Motor Board, Getting Started, before reading this article.
Hardware
-
DC Motor Board
-
ZKit-ARM-1343
-
10 Pin FRC cable.
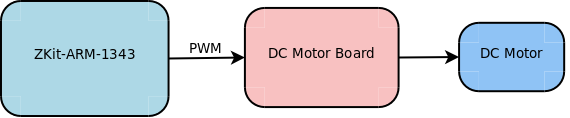
Connect the DC Motor board to SPI header of ZKit-ARM-1343. Since Pin
2,3 of SPI header is mapped to PWM Channel 2, 0
| PIN# | DC Motor Board | ZKit-ARM-1343(SPI Header) | ZDev API Macro |
|---|---|---|---|
1 |
VCC |
VCC |
- |
2 |
PWM0 |
SCK |
PWM_CH2 |
3 |
PWM1 |
MIS0 |
PWM_CH0 |
10 |
GND |
GND |
- |
Software
The software for controlling a DC Motor uses a finite state machine.
To acheive this we are going to use event ZDev Library.
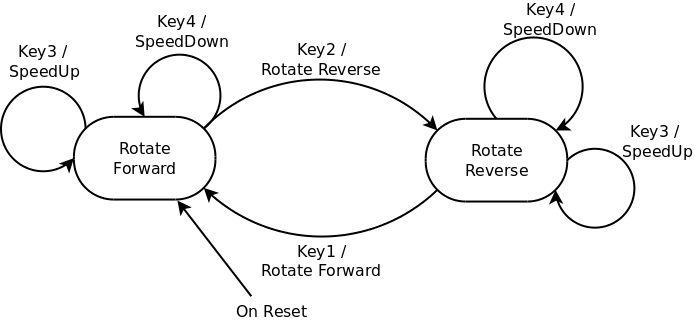
The State machine for DC Motor application has two states.
-
Rotate Forward
-
Rotate Reverse
On reset, the motor will rotate forward with 10% speed. State transistion occurs when Key1 or Key2 is pressed.
If,
-
Key1 is pressed the Motor rotate forward.
-
Key2 is pressed the motor will rotate reverse.
-
Key3 is pressed speed will be increased.
-
Key4 is pressed speed will be decreased.
No state transisiton for the follwing events.
If,
-
Key1 is pressed and the motor state is Forward.
-
Key2 is pressed and the motor state is Reverse.
The above logic is implemented by registering handler() function
using button_setcb(). By using event_poll() button press is
detected and the handler function gets called in the event poll loop.
button_setcb(handler);
event_poll();
Following is the source code for DC Motor application.
/*
* Controlling a DC motor using PWM
*/
#include <board.h>
#include <pwm.h>
#include <delay.h>
#include <button.h>
#include <event.h>
enum motor_direction {
FORWARD,
REVERSE,
SPEEDUP,
SPEEDDOWN
};
int duty = 0;
int forward_ch = 0;
int reverse_ch = 0;
int state = FORWARD;
void motor_init(int forward_channel, int reverse_channel)
{
forward_ch = forward_channel;
reverse_ch = reverse_channel;
pwm_set_period(forward_ch, 14);
pwm_set_period(reverse_ch, 14);
}
/**
* motor_start - start the motor
* @direction: direction of the motor rotation (FORWARD | REVERSE)
* Starts the motor in the current direction.
*/
void motor_start(int direction)
{
if (direction == FORWARD) {
pwm_set_duty(reverse_ch, 100);
pwm_set_duty(forward_ch, duty);
} else {
pwm_set_duty(forward_ch, 100);
pwm_set_duty(reverse_ch, duty);
}
pwm_start(forward_ch);
pwm_start(reverse_ch);
}
/**
* motor_stop - stops motor
*
* stops the motor it slowes down eventually
*/
void motor_stop(void)
{
pwm_set_duty(forward_ch, 100);
pwm_set_duty(reverse_ch, 100);
}
/**
* motor_brake - brakes the motor
*
* brakes the motor so it stops immediately
*/
void motor_brake(void)
{
pwm_set_duty(forward_ch, 0);
pwm_set_duty(reverse_ch, 0);
}
/**
* motor_chnage_speed - change the motor speed.
* @speed - Increment or Decrement of speed (SPEEDUP or SPEEDDOWN)
**/
void motor_change_speed(int speed)
{
if (speed == SPEEDUP) {
duty -= 10;
if (duty < 0)
duty = 0;
} else if (speed == SPEEDDOWN) {
duty += 10;
if (duty > 100)
duty = 100;
}
}
/**
* handler - Handle the button events
**/
void handler(void)
{
char k;
k = button_getc();
if (k == 0) {
state = FORWARD;
motor_stop();
mdelay(100);
} else if (k == 1) {
state = REVERSE;
motor_stop();
mdelay(100);
} else if (k == 2) {
motor_change_speed(SPEEDUP);
} else if (k == 3) {
motor_change_speed(SPEEDDOWN);
}
motor_start(state);
}
int main(void)
{
board_init();
pwm_init();
delay_init();
button_init();
motor_init(PWM_CH2, PWM_CH0);
button_setcb(handler);
event_poll();
return 0;
}
Credits
The DC Motor icon is based on the original image located here, at Wikimedia Commons.
{kind=link}